 Сервис
Сервис Техподдержка
Техподдержка Документы
ДокументыКонцепция создания информационного пространства, его анализа и визуализации, как цифрового ассистента безопасного судовождения.
Технология разработки единой судовой базы данных, создания ЦОД для анализа, прогноза и построения математической модели из полученных данных, с целью формирования дополненной реальности.
Данная работа описывает возможность создания единой судовой базы данных, создания ЦОД для анализа ее данных, прогнозирования развития событий и построение математической модели на полученных данных. С последующим формированием программно-аппаратного комплекса дополненной реальности в качестве помощи судоводителю для принятия решения в процессе деятельности. При использовании комплекса увеличивается безопасность судовождения, соответственно при его реализации достигается дополнительный экономический эффект.
Содержание
- Предпосылки
- Клиенты
- Объем судовой информации
- Современные методы отображения информации на судовом мостике
- Перспективы прогнозирования развития событий для безопасности судовождения
- Конкурентные преимущества
- Описание предлагаемой системы
- Сроки изготовления комплекса
Предпосылки.
По данным The Swedish Club, за период 2014 по 2018 гг., навигационные аварии составили 30% страховых случаев по типу и 33% страховых случая по стоимости. Отсутствие навигационной осведомленности среди судоводителей было названо наиболее распространенной причиной столкновений (45%) и второй по распространенности, причиной самых дорогих страховых случаев (27%) в период с 2013 по 2017 гг.
Дополненная реальность.
Первая технология дополненной реальности была разработана в 1968 году в Гарварде Иван Сазерлендом, который создал носимую систему отображения информации, с возможностью проецирования виртуальной среды на физическую среду. С тех пор, множество компаний и лабораторий занимались развитием данной технологии. Впоследствии, ее усовершенствованный вариант начали активно использовать в авиационных, промышленных и военных целях. В 1992 году Том Коделл впервые предложил термин «дополненная реальность». Перед ним и его коллегой была поставлена задача: снизить затраты на дорогие диаграммы, применяемые для разметки заводских зон в процессе сборки самолетов Боинг. Решением ученых стала замена фанерных знаков с обозначениями на специализированные шлемы, отображающие информацию для инженеров. Это позволило не переписывать обозначения каждый раз вручную, а просто изменять их в компьютерной программе.
Дополненная реальность (англ. Augmented Reality, AR) – это технология проецирования цифровой информации (изображение, видео, текст, графика и т.д.) поверх экрана любых устройств. В результате реальное изображение дополняется искусственными элементами и новой информацией (рис. 1)

Рисунок 1 - Проецирование цифровой информации на мостик
Технология дополненной реальности актуальна и в судоходстве поскольку позволяет обеспечивать вахтенного офицера необходимыми данными. Информацию условно можно разделить на два типа - базовая и дополненная. К базовой информации относится: скорость движения судна, курс, глубина под килем, погода и т.д. Дополненная информация - это массив данных, который обычно не отображается на мониторах мостика судна. К ней можно отнести: визуализацию навигационных препятствий, судов, движущихся в ближнем радиусе движения судна, траекторию движения судна, направление и скорость ветра, дистанцию до навигационных препятствий.
Источники информации.
Источниками информации, отображающими внешнюю обстановку на судне, являются: радиолокационная станция, навигационный комплекс, автоматическая идентификационная система (АИС), лидар, камеры, эхолот, лаг, метеостанция и пр. В классической архитектуре судового мостика параметры, от вышеуказанных приборов и комплексов, отображаются на различных пультах и мониторах. Технология дополненной реальности позволяет объединить параметры внешней обстановки по группам и индивидуально адаптировать их под требования запрашиваемой информации вахтенным офицером. Таким образом, вахтенный офицер получает всю внешнюю обстановку на прозрачном широкоформатном дисплее, в так называемом «едином окне».
Безопасность судовождения.
В настоящее время, основным назначением применения технологии дополненной реальности в судостроении, является повышение безопасности судовождения. В сложных гидрометеорологических условиях (туман, снежный заряд, дождь) становится визуально сложно, а порой и физически невозможно оценить навигационные препятствия. В то время, как технология дополненной реальности, независимо от погодных условий, позволяет отображать визуальную информацию о навигационных объектах, дистанции до них, направлении их движения, скорости и траектории пересечения курсов. Становится очевидным, что дополнительная визуализированная информация не может быть избыточной при осуществлении судовождения в сложных гидрометеорологических условиях. Следующим аспектом, в пользу установки на судне данной системы, является преимущество при маневрировании в узкостях (проливы, реки, порты). Технология позволит отображать объекты вне зоны видимости визуальных постов наблюдения.
В состав базовой конфигурации технологии дополненной реальности на судне входят следующие элементы: серверная стойка обработки информации, прозрачный широкоформатный дисплей, панель управления отображения информацией, IP-камеры.
Единый мостик
Компания Rolls-Royce разработала судно Stril Luna с архитектурой «Единого мостика». Единый мостик представляет собой центральную точку доступа ко всей информации, обеспечивающей безопасную и эффективную работу судна. В первую очередь речь идет о функционировании пропульсивной установки, системы автоматизации, системы управления силовой установкой, навигации, радаров и системы связи. Новое решение позволило быстрее оценивать всю ситуацию в целом на одном экране в едином графическом интерфейсе, поскольку объединило всю информацию о судне, разрозненную ранее на различных дисплеях и датчиках. Централизованно аккумулированные показатели различных подсистем анализируются, а результаты передаются на мониторы, подключенные к системе «единого мостика» (рис.2)

Рисунок 2 – Концепция «единого мостика»
AR Navigation System
Японская компания «Furuno» разработала и успешно продает навигационную систему дополненной реальности «AR Navigation System». Система использует возможности дополненной реальности, выводя управление судном за рамки привычной действительности. С камеры, направленной вперед по курсу движения судна, на экран проецируется изображение. AR-технология накладывает на это видеоизображение всю необходимую навигационную информацию в режиме реального времени. В неблагоприятных погодных условиях или в условиях плохой видимости, сохраняется возможность четко определить местоположение и курс других судов, получить о них необходимую информацию, а также вывести на экран данные о собственном судне (рис. 3).

Рисунок 3 - AR Navigation System компании «Furuno»
В стандартный состав навигационной системы дополненной реальности «AR Navigation System» входят: процессорный блок, IP камера, дисплей, адаптер, трекбол и ENCключ.
Предполагаемая динамическая траектория движения судна (ПДТДС). Российские разработчики шагнули дальше и провели работу по построению математической модели поведения судна в ближайший период времени. Научно-исследовательская работа, по разработке системы прогнозирования предполагаемой динамической траектории движения судна (далее - ПДТДС) [1], ведущаяся на кафедре Систем информационной безопасности, управления и телекоммуникаций ФГБОУ ВО «ВГУВТ» при участии группы компаний «Маринэк», в части технической реализации и программного обеспечения (далее - ПО), должна решить задачу по снижению ошибок судоводителя, обусловленных оценкой результатов визуального наблюдения и навигационными просчетами последующего целеполагания.
Применение результатов предложенного решения, позволит спрогнозировать траекторию движения судна, с последующим предоставлением ее визуализации судоводителю, для принятия объективного решения об управляющем воздействии на ДРК (расшифровать) судна.
Разрабатываемый программный комплекс ПДТДС «ПОВОРОТ», устанавливается на суда и служит для представления на экране монитора траектории движения судна, с учетом его инерциальных характеристик. Система включает в себя программно-аппаратный комплекс, выполненный на базе судового компьютера видеокамерой, установленной по курсу и монитор, который размещается в удобном для судоводителя месте рулевой рубки. Комплекс предназначен для расчета показателей движения судна и траектории его движения, с учетом инерциальных характеристик судна, определяемых для вновь построенных судов. Вывод информации осуществляется в графическом режиме на экран судоводителя, накладываясь на видеопоток в реальном времени. Расчет и построение траекторий производится с учетом текущих параметров движения судна. Ключевые из них основаны на следующих характеристиках:
- соотношение высоты надводной части к погруженной;
- осадка судна;
- длина и ширина судна;
- коэффициенты примененной математической модели судна [2, 3];
- угол наклона сепаратрисы (приход в седло) и угол наклона линии основных движений (уход из седла).
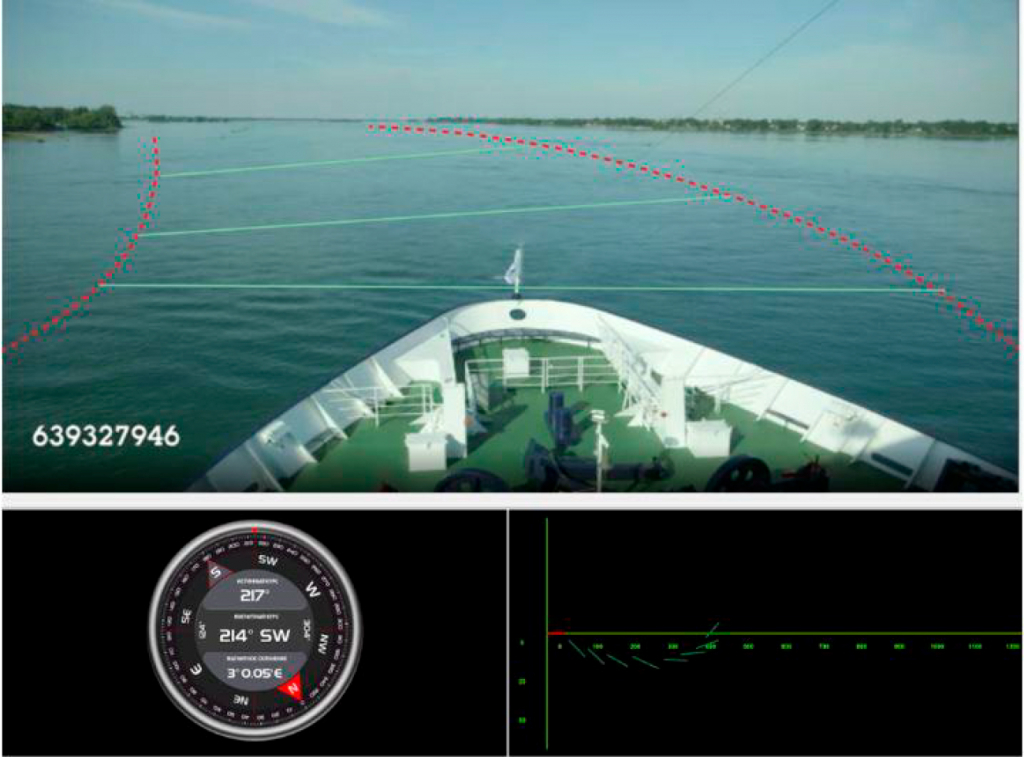
Рисунок 4 – Построение ПДТДС на видеопотоке в реальном времени.
В ситуации максимального предоставления информации судоводителю для принятия решений, существует несколько видов сведений:
- внешнее воздействие касательно погодных условий, поведение водной массы и т.п.;
- навигационная обстановка вокруг судна, включая иные суда и плавающие объекты;
- объекты и системы навигационного обеспечения, опасности, рекомендованные маршруты и т. п.
- непосредственно само судно - его скорость, курс, положение руля, инерционная составляющая, крен, деферент, режим работы пропульсивной системы, узлов и механизмов и пр.
Вся информация в различном приоритете необходима для принятия решений, начиная с внешних, как подача сигнала, до курса следования судна и использования различных режимов хода и пр. При этом уровни приоритетности у одного и того же типа информации, в зависимости от его параметра, могут меняться. Например, течение важно учитывать при большой скорости судна и возможно им пренебречь в случае его локальности. Судно на большом ходу в достаточном удалении безопасно, но при попадании его в непосредственную близость важен уже учет и контроль над его действиями. В современных реалиях, подача вышеуказанной информации, только маркируется цветом и дублируется сигналом, при этом без возможности привлечения особого внимания судоводителя на данный параметр. Зачастую, возникают ситуации, где соединение нескольких параметров, на первый взгляд безопасных по отдельности, приводит к навигационному происшествию. Например, такие параметры как не сильное течение, перекладка руля, инерционная составляющая и близкая мель вполне могут иметь приемлемое значение, но при объединении данных параметров ив случае стечения определенных внешних обстоятельств, возможен неуправляемый разворот судна, с последующей посадкой его на мель. В 2021 году аналогичное навигационное происшествие произошло с контейнеровозом Ever Given, который посреди Суэцкого канала сел на мель, заблокировав судоходство на несколько дней.
Речной флот стоит в более сложном положении, так как его деятельность постоянно происходит в условиях интенсивного судоходства и при этом в сжатых акваториях. Кроме того, поведение маломерного флота на реках в большей степени отличается халатным отношением к установленным правилам, провоцируя многочисленное количество навигационных происшествий. Не контролируемая скорость, маневренные характеристики и непредсказуемое поведение маломерных судов, являются серьезным вызовом, даже опытному судоводителю на внутренних водных путях.
Примеры существующих наработок:
https://www.furuno.com/special/en/envision/
https://www.raymarine.com/multifunction-displays/lighthouse3/v3-7/clearcruise- ar.html
https://www.ship-technology.com/projects/simon-mokster-psv-norway/
Клиенты.
В настоящее время мировой флот насчитывает несколько десятков миллионов судов, из них порядка 120 000 крупнотоннажного флота. Только в Российском Морском Регистре Судоходства зарегистрировано порядка 3 000 самоходных судов, а в Российском Речном Регистре около 33 000 судов, не считая маломерного флота и иных плавсредств. При рассмотрении возможности освоения данной системы военным флотом только в России количество потенциальных клиентов увеличивается более чем на 1 500 единиц. Сейчас заинтересованность в рассматриваемой разработке высказывают крупные российские судовладельцы и пароходства, научная отрасль и государственные учреждения. Понимая возможности экономии ресурсов на правильно построенных транспортных линиях, системах принятия решений и реагирования, операторы разного уровня заинтересованы во внедрении в судовые информационные системы данных нововведений. Возможны варианты как модально с различным уровнем интеграции, так и внедрение полноценных систем с максимальным функционалом. При этом бизнес-модель единовременного приобретения или оформления подписки, является формой диалога. С учетом затрат ресурсов на обеспечение информацией судовладельца, добавления элементов полноценного донесения непосредственно до оператора, является критическим элементом окончания построения информационного поля судна. Важно, что порты, шлюзы, диспетчерские центры и системы управления движения судов, так же могут оснащаться подобной системой, доработанной в соответствии с их требованиями.
Объем судовой информации.
На данном этапе развития судоходства количество оборудования, контролирующего внешнюю среду, обстановку вокруг судна и непосредственно само транспортное средство, довольно велико. Это навигационные системы, метеорологические системы, системы связи, системы управления судном, аварийно - предупредительные сигнализации, телематические системы машинного обмена информацией и пр. Действие всех систем систематизировано и определенно требованиями не только производителей узлов, агрегатов и транспортных систем, но и IMO. Основным протоколом обмена информации на судне между навигационными приборами и системами связи является NMEA 0183 (от «National Marine Electronics Association»). Стандарт, определяющий текстовый протокол связи морского (как правило, навигационного) оборудования (или оборудования, используемого в поездах) между собой. Есть более современные стандарты связи, и они так же унифицированы между собой. Сложнее с информационной системой управления транспортным средством (ИСУ ТС). Обмен информации между элементами строится на протоколах определенных производителем, и может иметь существенные отличия между собой от использования аналогового сигнала, до привычных многим стеку протоколов TCP/IP. При этом в данных системах объем сигналинга может доходить до нескольких тысяч элементов. Судовая ИСУ ТС следит за ними, но судоводителю эти данные нужны по обстановке в определенный момент, либо при его критических изменениях.
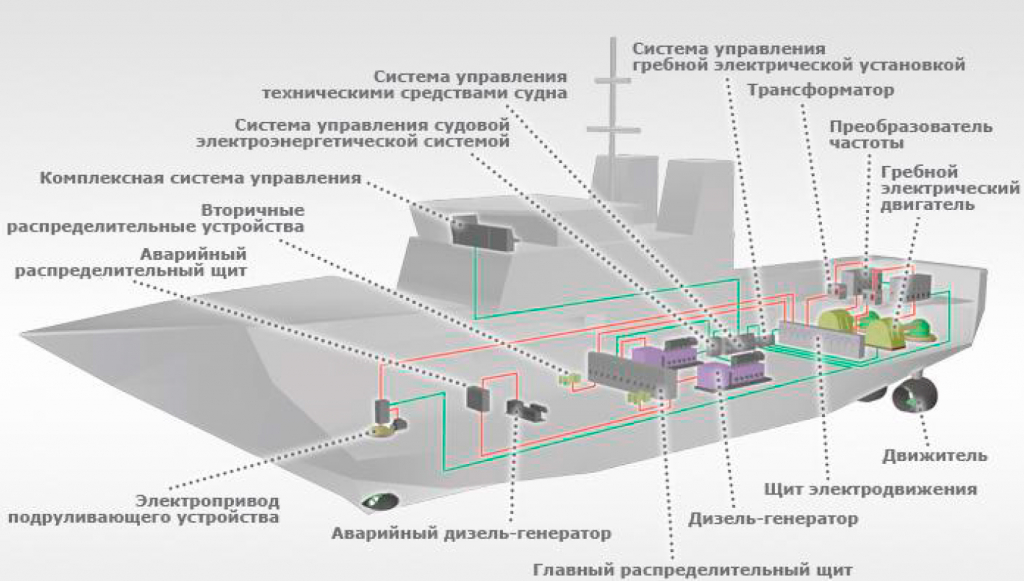
Рисунок 5 – Пример схемы обмена информацией судовыми систем
Современные методы отображения информации на судовом мостике.
На данном этапе, вся информация освещения надводной, подводной обстановки и сведенья с информационной системы управления транспортного средства, сводятся на единый пульт управления, находящийся на мостике судна, и представляющего собой интегрированную систему ходового мостика.
Интегрированная система ходового мостика (Integrated Bridge System) – это система, включающая в свой состав несколько систем программно-аппаратного комплекса, в котором применен системный подход к автоматизации процессов сбора, обработки, отображения информации, для выполнения функций навигации, управления судном, радиосвязи и обеспечения безопасности, с целью достижения максимальной эффективности вахты квалифицированным персоналом на мостике.
Интегрированная система ходового мостика (ИСМ) относится к классу информационно-управляющих систем. ИСМ образуется путем применения специальных программ для установления связей между отдельными ее частями, с последующим обеспечением их совместной работы.
Интеграция систем ходового мостика позволяет:
- автоматизировать выполнение комплексных задач судовождения;
- создать единую информационную среду, как основу эффективной поддержки решений вахтенного помощника;
- организовать централизованный контроль работы оборудования, от которого зависит безопасность судна и груза;
- обеспечить централизованное управление силовыми средствами и другим оборудованием судна.
Основой функционирования ИСМ являются параметры и характеристики, содержание внешних и внутренних информационных взаимодействий. Это определяет построение ИСМ как информационной сети, в которой взаимодействие между частями производится в соответствии со специальным протоколом. Выпускаемые разными фирмами образцы ИСМ имеют определенные отличия по составу, выполняемым функциям и дизайну. Типовой интегрированный мостик включает в себя:
- Систему навигационных датчиков (Navigation Sensors);
- Навигационно-информационную систему – НИС (Navigationand Information System);
- Систему для предупреждения столкновений – СПС (Collision Assessment and Avoidance System);
- Систему оценки и оптимизации мореходности – СОМ (VesselSeaworthiness Assessment and Optimization System);
- Систему планирования и оптимизации пути – СПП (Voyage Planning and Route Optimization System);
- Станцию управления движением судна – СУД (ManeuveringControlStation);
- Централизованную систему мониторинга и сигнализации - ЦСМ (CentralizedMonitoringandAlarmSystem);
- Интегрированную систему радио связи – ИСР (Integrated Radio Communication System – IRCS);
- Регистратор данных рейса – РДР (Voyage Data Recorder – VDR);
- Консоль управления движением с крыла мостика (Bridge WingConsole).
В настоящее время, данная система представляет собой пульт управления, представленный на изображении . Рис.6.

Рисунок 6. Пример интегрированной системы ходового мостика.
При этом данный пульт должен отвечать требованиям ГОСТ 23000-78 «Система "человек-машина". Пульты управления. Общие эргономические требования». Видимость с ходового мостика каждого судна должна быть не хуже, чем установлено стандартами в Резолюции ИМО А.708 (17) «Navigation bridge visibility and functions» и требованиями Конвенции СОЛАС, Глава V «Безопасность мореплавания», Правило 22 «Видимость с ходового мостика». Кроме того, существуют требования IMO к представлению навигационной информации на судовых средствах отображения (дисплеях). Тем самым, большая часть взаимодействия данной интегрированной системы ходового мостика и оператора строго регламентированы: определенны порядок передачи данных, их расположение, ввод внешнего воздействия и т.д. Поэтому, даже с минимальным набором информации, как показано на примере ранее, пульт становится громоздким, рассчитанный для работы нескольких операторов и не совсем практичным в применении. На рисунке 7, изображен ЭКНИС (электронная картографическая навигационно-информационная система) и работа оператора с ним. Как видно, получение оперативной информации затруднительно, поскольку несколько десятков элементов преподносят данные, которые необходимо воспринимать в свете иных сведений с других приборов. При этом надводная обстановка в режиме реального времени достаточно вариабельна. В итоге, зачастую судоводитель действует по наитию, опираясь на свой практический опыт и на то, что он видит в данный момент времени.

Рисунок 7. Изучение данных предоставляемых ЭКНИ
Тем самым, с приходом более молодых и менее опытных судоводителей, качество управления судами резко падает, количество навигационных происшествий увеличивается, а судовладельцы несут убытки. Данная тенденция является общемировой и принимается к учету во многих существующих процессах, в частности, при обучении судоводителей при административном ужесточении требований к качеству капитанов т.д. Однако все не решает проблему и не является полноценным решением, так как не дает ответы на многие вопросы. Отраслевое сообщество крайне обеспокоенно возникающей проблемой. Современные тенденции развития безэкипажного судовождения, лишь один из примеров решения данной проблематики.
Перспективы прогнозирования развития событий для безопасности судовождения.
Построение прогноза возможности разностороннего развития события, на базе максимально возможных информационных каналов, является инновационным в безопасности судовождения. Возможность избежать большого числа навигационных происшествий и аварий на судне, предугадывая их возникновение. Авария контейнеровоза «Эвер Гивен» могла быть не допущена, если бы на борту судна был установлен данный комплекс. При необходимости прогноз развития событий мог бы быть направлен оператору судна и службе обеспечения канала, что позволило бы предпринять меры для предотвращения происшествия. В другом случае, наличие определенного количество воды в трюме, сильный крен и маневрирование судна может привести к его опрокидыванию, что вполне возможно избежать, сопоставив все три фактора. Компания «Маринэк» активно и успешно ведет наработки подобных систем предупреждения и прогнозирования, но необходим комплексный подход. С увеличением количества принимаемых сведений к расчету, качество прогноза только улучшается. В случае достижения высокого процента вероятности подтвержденных событий, установка данного комплекса необходима в качестве обязательного оснащения определенного типа судов под юрисдикцией IMO. На данный момент безопасность судовождения, является приоритетом развития технологического оснащения судна. Конвенция об открытом море 1958 года строго регламентирует:
Каждое государство обязано принимать необходимые меры для обеспечения безопасности в море судов, плавающих под его флагом, в частности, в том, что касается: конструкции, оснащения судов и их мореходных качеств.
Тем самым, вектор на оснащения судов уже закреплен в межгосударственных договоренностях законодательно. Поэтому, необходимо довести данный комплекс до возможности его широкого практического применения в судовождении. Все судовые системы и комплексы ранее были в новинку, но в настоящее время они являются нормой и обязательным оснащением судов, без которых выход в море просто не возможен. Пройдет время и данный комплекс также станет нормой в технологическом оснащении судов.
Конкурентные преимущества.
Основным конкурентным преимуществом данного продукта является сбережение ресурсов и качественное увеличение уровня безопасности мореплавания. Кроме того, имеет дополнительно несколько иных конкурентных преимуществ:
- Возможность комплекса, на объеме поступающих данных, провести математический анализ и спрогнозировать развитие ситуации;
- Максимальная универсальность интеграции с существующими судовыми системами, даже при отсутствии протоколов от производителя данных систем;
- В параллели с иными системами освещения надводной обстановки, проведение анализа видеопотока, поступающего с системы технического зрения, и выявление всех необходимых параметров окружающей обстановки;
- Максимальный прием данных, поступающих с широкого круга инструментов;
- Удобная платформа зрительной и слуховой визуализации;
- Независимое информирование судоводителя о наступивших, или имеющих возможность наступления, критических событий;
- Учёт опыта команды, создававшей подобные комплексы в интересах судоходства и авиации
- Существующий интерес от судовладельцев, изъявивших готовность полноценно участвовать в создании данного комплекса;
- Дублирование систем различными каналами поступающих данных и контроль за их правильной эксплуатацией;
- Интерес со стороны военных и силовых структур;
- Возможность масштабирования на другие транспортные средства;
- Большая заинтересованность в подобном комплексе всего мирового флота;
- Использование современных научных изысканий в области математического моделирования и прогнозирования технологических процессов;
- На базе реальных событий, воссозданным с разработанным комплексом, возможность создания тренажеров и обучение персонала, с максимальным погружением в реальность происходящего на море;
- Создание судовой базы данных, для последующего анализа и помощи при проведении административных мероприятий;
- Постоянный мониторинг поступающих внешних данных на судно;
- Возможность применения на безэкипажном транспортном средстве;
- Возможность виртуального онлайн присутствия более опытного судоводителя, с выдачей актуальных моментальных рекомендаций по действию в море;
- Предоставление судоводителю необходимой информации для ознакомления без потери контроля над нужными данными;
- Более детальная и удобная для восприятия прорисовка данных, предоставляемых картографической системой, техническим зрением, радиолокационной станцией и пр.;
- Онлайн отображение инерционных составляющих движения судна, а а так же с возможностью его прогнозируемого движения;
- Визуализация глубин с подсветкой опасных участков;
- Обмен данных между комплексами, установленными на разных судах, для принятия к исчислению данных друг друга;
- Возможность использования на системе управления движениями судов;
- Информационный обмен с системой управления движениями судов, для более точной и детальной прорисовки обстановки в зоне ответственности станции.
Описание предлагаемой системы.
Планируется создание программно-технического комплекса автоматизированной системы. Продукция будет представлять собой совокупность средств вычислительной техники, программного обеспечения, средств создания, заполнения машинной информационной визуализации, достаточной для выполнения задачи по максимально доступному предоставлению сведений судоводителю. (Соответствие ГОСТ 34.003-90. Информационная технология (ИТ). Комплекс стандартов на автоматизированные системы. Автоматизированные системы. Термины и определения.)
Аппаратная часть.
Один из компонентов - аппаратный комплекс, основанный на микросхемах процессора, чипсета, и других физических компонентов, которые в совокупности составят модель вычислительной системы Фактически это будет нижний слой многоуровневой организации вычислительной системы (аппаратура, операционная система, прикладное программное обеспечение), на который опираются ОС и прикладное ПО. Прогнозируется возможность выполнения задачи, поставленной перед комплексом, на простом терминальном сервере. В частности, сервер терминалов (англ. Terminal server) — сервер, предоставляющий клиентам вычислительные ресурсы (процессорное время, память, дисковое пространство) для решения задач. Технически, терминальный сервер представляет собой компьютер (либо кластер), соединенный по сети с терминальными клиентами (составляющие элементами навигационной системы судна, информационная система управления судном, датчики и источники информации и т.д), которые необходимы оператору управления для выполнения специализированных задач.
В данном случае рабочими станциями будут выступать все те же микроконтроллеры с различными задачами, элементами ввода и внешними источниками информации. Практически любая составляющая судовой информационной навигационной или иной сети управления состоит из данных узлов. Все они оснащены средствами отображения информации, либо модемами передачи телематической информации в сеть. Каждый элемент имеет свой протокол передачи данных, и для навигационной сети они определены NMEA. Иные данные, так же имеют свои правила и логику, отвечающие современным стандартам. Снятие информации с каждого элемента сети является одним из важных этапов работы комплекса, но не является критичным для создания такового. Подобная работа ранее была успешно выполнена. Вся информация с радиолокационной станции, технического зрения, ГНСС приёмников, телематики и прочих узлов сетей маломерного судна и беспилотного летательного аппарата были объединены в единую сеть, с предоставлением оператору в удобном для восприятия формате. При этом были применены технические решения, позволяющие не вмешиваться в работу самих систем и не обращаться к производителям оборудования, для раскрытия протоколов обмена информации и управления самих устройств. Таким образом, сервер будет принимать необходимые для исчисления данные, от всех компонентов единой информационной сети судна, и уже на базе своих вычислительных мощностей, посредством разработанного ПО, преобразовывать их в интуитивно понятном формате, накладывать на видеопоток с привязкой к реальным отображаемым объектам.
Сетевая инфраструктура.
Сама сеть организуется посредством существующей продуктовой линейки, представленной на рынке промышленных, транспортных и судовых коммутаторов, концентраторов, модемов, маршрутизаторов и прочей сетевой инфраструктуры. Их существующая ёмкость, скорость, возможность организации сети и архитектуры отвечает требованиям комплекса. Данные складываются в определённый поток, со своими физическими и логическими интерфейсами. При этом существующий ряд преобразователей, различных переходников и коннекторов форматируют их в необходимый формат, с необходимыми параметрами для восприятия, дешифровки и использования в целях решения задач, стоящих перед создаваемым комплексом. Тем самым, сбор информации в едином месте возможно осуществлять стандартными методами построения локальных сетей, на базе готовых решений.
Программное обеспечение.
Основой всего комплекса является программное обеспечение (ПО), решающее задачи по непосредственному сбору, преобразованию, визуализации и просчёту возможного развития событий. В соответствии с ГОСТ Р 54593-2011 (Информационные технологии. Свободное программное обеспечение. Общие положения). ПО - это совокупность программ системы обработки информации и программных документов, необходимых при эксплуатации комплекса. Следует отметить, что оно включает в себя несколько программных комплексов и модулей, последовательно реализующих подзадачи в интересах общей задачи. На основе данного ПО, из различных структур необходимых элементов, при реализации будет формироваться программный продукт под конкретное судно, судовладельца, стоимость и прочие составляющие коммерческую продажу.
Весь цикл, выполняемый ПО будет состоять из:
- сбора информации;
- просчёта данных, их анализа, возможного воздействие друг на друга, возможная синергия и пр.;
- прогнозирования развития технологических процессов, развития окружающей обстановки и пр.;
- выдача структурной картины происходящего в данный момент, в прошлом и прогнозированного будущего;
- информирования оператора о возникающих критических ситуациях, а также о возможности их возникновения.
База данных.
Первый этап прохождения информационного сигнала — это его сбор, преобразование в принимаемый документом формат, и последующее сохранение в базе данных. Это процесс программного компонента с функционалом сбора и обработки информации. Довольно распространенная методика работы, не отличающаяся принципиально от иных программных компонентов, похожих по выполняемому функционалу. Подобные принципы работы использует и информационная система управления судном, электронная картографическая система, объединенная в навигационный комплекс, системы сигнализации и пр. Основная задача данного этапа, сформировать правило создания документа по сбору и хранению информации, а также структурировать её выдачу иным программным модулям и компонентам. Основным упором, при создании данного компонента, будет унификация поступающих сигналов, возможность максимально расширить круг производителей, чьи данные систем сможет получить, преобразовать и понять программа. В случае с навигационными системами, не возникает вопросов преобразованием данных картографических систем, автоматики управления судном, сигналинга охранных/аварийных/пожарных и подобных систем, видеопотока, данных с технического зрения и прочее, необходимо будет распознавать на программном уровне в более сложной логике. Успешный опыт решения подобной задачи есть. Программный компонент, так же будет иметь возможность управлять сетевой периферией, для систематизации и структурирования построения сбора данных.
Второй этап, это создание математической модели просчета поступаемых данных, распределение их по категориям воздействия на судно, анализ окружающей обстановки и внутренних процессов на изменения систем и пр. Построение ассоциативных связей, точечное и комплексное влияние друг на друга различных факторов, формирование данных поведенческих моделей с последующим выявлением положительной и отрицательной синергии в моменте. Фактически, это является разработкой базы данных с понятным каналом для их ввода, отношения между разными типами данных, способами группировки и организации, их форматы и атрибуты. Систематизация этих данных будет использовать стандартизированные схемы и формальные методы. Это обеспечивает последовательный и предсказуемый способ управления данными на следующем этапе.
Основные требования к базе данных стандартных типовых требований:
- Многократное использование данных: пользователи должны иметь возможность использовать данные различным образом.
- Простота: пользователи должны иметь возможность легко узнать и понять, какие данные имеются в их распоряжении.
- Легкость использования: пользователи должны иметь возможность осуществлять (процедурно) простой доступ к данным, при этом все сложности доступа к данным должны быть скрыты в самой системе управления базами данных.
- Гибкость использования: обращение к данным или их поиск должны осуществляться с помощью различных методов доступа.
- Быстрая обработка запросов на данные: запросы должны обрабатываться с помощью высокоуровневого языка запросов, а не только прикладными программами, написанными с целью обработки конкретных запросов.
- Язык взаимодействия конечных пользователей с системой должен обеспечивать возможность получения данных без использования прикладных программ.
К условиям достижения максимального эффекта можно отнести следующие условия, требуемые для соблюдения при построении базы данных:
- постановка четких целей на всех уровнях иерархии базы;
- приведение всех данных к единому унифицированному образцу, с их свойствами, атрибутами и местом;
- расставление уровней плавающего приоритета разным данным, с выделением им максимальных вычислительных мощностей на этапе первоначального просчета;
- сбалансированная краткосрочность данных, их расчетов и долгосрочность хранения информации об их воздействии на судно;
- постоянный контроль и анализ процесса преобразований с новыми поступающими данными;
- прозрачность, простота и удобство доступа ко всем данным машиной или оператором;
- возможность формирования нового типа данных, при внедрении дополнительного источника;
- возможность формирования новых свойств, атрибутов и места;
- возможность оперативного сохранения нужной информации;
- место для ведения лога.
База данных - это основа для будущего наращивания прикладных программ. Их наличие должно обеспечивать возможность быстрой и дешевой разработки новых приложений.
Для этого необходимо учитывать следующие факторы программ использования этой базы данных:
- Сохранение затрат умственного труда: существующие программы и логические структуры данных не должны переделываться при внесении изменений в базу данных.
- Наличие интерфейса прикладного программирования: прикладные программы должны иметь возможность просто и эффективно выполнять запросы на данные; программы должны быть изолированными от расположения файлов и способов адресации данных.
- Распределенная обработка данных: система должна функционировать в условиях вычислительных сетей и обеспечивать эффективный доступ пользователей к любым данным распределенной БД, размещенным в любой точке сети.
- Адаптивность и расширяемость: база данных должна быть настраиваемой, причем настройка не должна вызывать перезаписи прикладных программ. поставляемый с СУБД набор предопределенных типов данных должен быть расширяемым - в системе должны иметься средства для определения новых типов, при этом не должно быть различий в использовании системных и определенных пользователем типов.
- Контроль целостности данных: система должна осуществлять контроль ошибок в данных и выполнять проверку взаимного логического соответствия данных.
- Восстановление данных после сбоев: автоматическое восстановление без потери данных транзакции. В случае аппаратных или программных сбоев система должна возвращаться к согласованному состоянию данных.
- Вспомогательные средства должны позволять разработчику или администратору базы данных предсказать и оптимизировать производительность системы.
- Автоматическая реорганизация и перемещение: система должна обеспечивать возможность перемещения данных или автоматическую реорганизацию физической структуры.
Анализ данных
Синергия — усиливающий эффект взаимодействия двух или более факторов, характеризующийся тем, что совместное действие этих факторов существенно превосходит простую сумму действий каждого из указанных факторов. Эмерджентность — появление у системы свойств, не присущих её элементам в отдельности; несводимость свойств системы к сумме свойств её компонентов.
Эти два фактора самые важные компоненты просчетов данных. На сложнейших технологических процессах, протекающих на судне и вокруг него, постоянно возникают факторы, вызванные сторонними процессами. Будь то постоянное разрушающее воздействие на трубы жидкостями с непредусмотренными примесями, протекающими по ним, влияние инерции, течения на маневровые характеристики судна и усиления этих факторов ударами боковой волны, зачастую не подвергаются анализу, а принимаются ко вниманию судоводителем, только при видимом влиянии. Только после этого, вносятся корректирующие управленческие воздействия. Нейронные сети способны предусмотреть максимально точно такие пересечения, их возможное влияние и представить новые данные уже с учетом имеющихся факторов. Например, при учете рыскания судна, или различного заглубления винтов под воздействием постоянного крена, возможна корректировка работ главных двигателей, тем самым создание положительного эффекта, в виде сохранения топлива и уменьшение аномальных процессов, возникающих в самой технологической системе.
Прогнозирование.
На базе вышеуказанного анализа и строится третий этап - прогнозирование развития технологических процессов и развития окружающей обстановки. Предлагается использовать метод дерева целей. Определенного порядка построения нет, данный процесс носит сугубо индивидуальный порядок, но формироваться он будет благодаря принципам и правилам его построения, базируясь на основах максимального раскрытия и получения информации. Между тем условно можно выделить основные этапы:
- Четкое формулирование генеральной цели каждого направления;
- Глубокий анализ потенциальных логических цепочек, определение путей ее достижения от первого источника до конечной точки, выраженные в многоуровневых подцелях;
- Предварительное схематическое распределение подцелей по иерархическому принципу, где учитывается одно важное условие – реализация подцелей каждого последующего уровня служит необходимым достижением предыдущего;
- Определение критериев по достижению генеральной цели, их оценка;
- Контрольное распределение подцелей по признаку значимости с определением очередности достижения целей, распределение ресурсов по их достижению.
Таким образом, каждая информация имеет под собой тот или иной вектор развития, как самостоятельная частица процесса, так и вкупе с иными данными. На базе машинного обучения, возможно выявить и спрогнозировать варианты развития событий, расставить им приоритетность и возможность возникновения. При этом, с продолжительностью обучения, систем вариантов будет все меньше и меньше, пока они не сведутся к необходимому минимуму. . Программа сама будет анализировать данные, и выделять те, которые так или иначе повлияли на возникновение события, тем самым на основе уже описанного объема данных проводить вычисления и прогнозировать развитие того или иного события. При этом, чем больше данных будет анализировать комплекс, тем точнее будут прогнозируемые расчеты, по разнообразию их горизонтального и временного развития.
Визуализация.
Дальнейшая задача комплекса будет состоять в визуализации полученных данных, с последующим прогнозированием данных и моделированием обстановки в максимально удобном формате для судоводителя.
Основой предоставления информации будет зрительное восприятие - (англ. Visual рerceрtion) - совокупность процессов построения зрительного образа мира, на основе сенсорной информации, получаемой с помощью зрительной системы.
Восприятие составляет основу ориентировки человека в окружающей действительности и позволяет ему организовать свою деятельность, поведение в соответствии с объективными свойствами и отношениями вещей. В процессе поведения человек воспринимает свои собственные действия и их результаты, формируя обратные связи, регулирующие протекание этого процесса. Восприятие - познавательный психический процесс, состоявший в целостном отражении предметов, ситуаций и событий, возникающий при непосредственном воздействии физических раздражителей на рецепторные поверхности органов чувств человека. Это процесс познания сложных вещей и явлений, существующих в мире, и представленных в сознании человека в виде образов. Именно эти образы и будут создаваться визуальной информационной средой вокруг судоводителя. Данные, не имеющие отношения к реальным объектам окружающей действительности, будут представляться в виде удобной иконографии и визуализации данных. Реальные же объекты будут распознаваться через видеопоток с камер, систему технического зрения, подсвечиваться визуальным объектом, либо контуром, либо сопровождаться линиями. При этом каждый объект будет иметь максимально подробную информацию, с графическим интерфейсом своих данных, поступившую от разных датчиков и систем, и рассчитанных непосредственно комплексом. При этом данные могут включать в себя вектор движения объекта, его скорость, снос, инерциальное перемещение, уровень крена и дифферента, наименование, координаты и прочее. Максимальное разнообразие необходимых сведений по объекту будут представляться непосредственно судоводителю. Контур, глубину, выделение тепла и прочее, возможно получать путем анализа картинки, полученной техническим зрением. С учетом исследований психологических принципов восприятия судоводителя, данная информация будет подаваться максимально эффективной, для ускорения процесса принятия решения при необходимости. При этом будут созданы несколько вариаций подачи информации, выбор которых будет производиться оператором непосредственно от его психологического состояния и иных факторов. Так же комплекс сможет воспроизводить ту же информацию как в прошлом, для оценки динамики изменений, произошедших на текущий момент, так и в будущем, прогнозируя изменения рассчитанные комплексом, для изучения возможного развития ситуации и предотвращения неблагоприятных последствий для судна. Некоторые данные возможно будет построить графически и представить в таблицах, это позволит оценить динамику их изменений едимоментно, охватывая всю выборку за определенный период, обозначенный судоводителем.
Необходимо будет провести исследования физического носителя отображения информации. Оценить возможность создания некого пульта дополненной реальности, например, накладки на иллюминаторы или прозрачные мониторы вокруг поста дополненной реальности, или жк дисплеи, с отображением данных с видеокамер и наложения на них информации с программного обеспечения дополненной реальности. На основании полученных данных создать мостик дополненной реальности, способный размещаться на современных мостиках и нести дополнительную функцию по информированию судоводителя.
Предупреждение.
Последний этап работы программного обеспечения — это предупреждения судовладельца о возникновении или наступлении возможного критического эффекта. Данное событие может возникнуть по результатам проведения расчетов комплекса, его прогноза или в связи непредвиденной ситуации, сложившейся на данный момент. Комплекс сможет представить данную информацию, как для слухового, так и для визуального восприятия. При этом с дублированием данных на комплексе в виде дополненной реальности возможного или случившегося события. Судоводитель на основе данной информации сможет предотвратить, либо принять действия по уменьшению негативных последствий эффекта случившегося.
В итоге, комплекс будет собирать всю необходимую информацию с установленных систем судна, снимать посредством технического зрения окружающую обстановку, определять определенные точки и их параметры, проводить анализ и необходимые вычисления, собирать сведения в базу данных, и представлять визуализацию, наложенную на реальную картину всех данных в удобном формате для судоводителя. Во всех временных диапазонах - в прошлом, настоящем и в будущем. В случае же фиксирования или вычисления возможных негативных последствий, проводить информирование экипажа об их наступлении.
Сроки изготовления комплекса.
Реализацию проекта по изготовлению данного комплекса возможно осуществить в течении 4 лет, с разбивкой его на три ключевых этапа:
- изготовление программного обеспечения;
- изготовление аппаратной части;
- изготовление аппаратной части;
Программное обеспечение.
Основную часть времени займет разработка программного обеспечения, так как аппаратная часть будет строиться на базе существующей готовой продукции сторонних производителей, отвечающей требованиям созданного программного обеспечения и доработанное под требования общих задач комплекса. Разработка ПО будет основана на методологии Scrum с принципами Agile
В данном случае планируется преследовать ключевые принципы методологии:
- Работа короткими циклами (спринтами)
- Гибкость. «Проверять и адаптироваться»
- Участие заказчика и пользователей в создании продукта.
Данное программное обеспечение состоит из нескольких совместно работающих программ (программных модулей), объединенных в единый программный комплекс, а так же документов, необходимых для его разработки, сопровождения и эксплуатации. Процесс разработки программного обеспечения будет разбит на следующие этапы (фазы):
- Первый этап – постановка задачи;
- Второй этап - выбор метода решения;
- Третий этап - разработка алгоритма решения задачи;
- Четвертый этап – кодирование алгоритма;
- Пятый этап – трансляция и компиляция программы;
- Шестой этап – тестирование программы;
- Седьмой этап – создание документации;
- Восьмой этап - сопровождение и эксплуатация
1. Первый этап – постановка задачи
Работа над программным обеспечением начнется с составления "Задания на разработку программного обеспечения (техническое задание)".
В техническом задании должно быть указано следующее:
а) Название задачи
Дается краткое определение решаемой задачи, название программного комплекса, указывается система программирования для ее реализации и требования к аппаратному обеспечению.
б) Описание
Подробно излагается постановка задачи, описывается применяемая математическая модель для задач вычислительного характера, метод обработки входных данных для задач не вычислительного характера и т д.
в) Управление режимами работы программы
Формируются основные требования к способу взаимодействия пользователя с программой (интерфейс пользователь-компьютер). Определяется визуализация и метод проработки психологических качеств судоводителя, для лучшего восприятия необходимой информации.
г) Входные данные
Определяются источники входных данных, их логические интерфейсы и протоколы, а так же тот объем информации, который будет необходимо снимать без предоставленной структуры взаимодействия с источником. В итоге, определяется структура формирования базы данных и обращения к ней.
д) Выходные данные
Опишутся выходные данные и укажется вид, в каком формате они должны быть представлены — числовом, графическом или текстовом формате, а также пропишется устройство их отображения. Определяются временные форматы обращения к данным.
е) Ошибки
Перечислятся возможные ошибки пользователя при работе с программой (например, ошибки при вводе данных и др.). Будут указаны способы диагностики (в данном случае под диагностикой понимается обнаружение ошибок при работе программного комплекса) и защиты от ошибок на этапе проектирования, возможные ошибочные действия судоводителя и реакция программного комплекса на эти действия.
ж) Пример работы программного комплекса
Приводится один или несколько примеров работы программного комплекса, на которых в простейших случаях проводится его отладка и тестирование.
2. Второй этап - выбор метода решения
На втором этапе создается математическая или логическая модель исследуемого явления реального мира. Приводится вывод всех используемых формул с подробными комментариями, а также словесное описание логической модели, в виде плана действий.
3. Третий этап - разработка алгоритма решения задачи
На данном этапе формируется общая структура программного комплекса. В соответствии с рассматриваемой далее технологией нисходящего структурного программирования, программный комплекс разбивается на небольшие части — программные модули (блоки). Для каждого программного модуля формулируются требования по необходимым функциям и разрабатывается алгоритм, реализующий эти функции.
Алгоритм представляет собой точное предписание, последовательность действий, приводящих к решению вычислительной или логической задачи.
Определяется схема взаимодействия программных модулей, т.е. схема потоков данных программного комплекса. Результатом выполнения этого этапа является блок-схема алгоритма решения поставленной задачи
4. Четвертый этап – кодирование алгоритма
Этап кодирования (программирования) алгоритмов, заключается в переводе алгоритмов, разработанных для каждого программного модуля, в программы. Результатом выполнения этого этапа являются файлы с исходными текстами программ.
На данном этапе предполагается использовать компонентный подход и case- технологии.
Компонентный подход представляет собой построение программного обеспечения из компонентов физически отдельно существующих частей программного обеспечения, которые взаимодействуют между собой через стандартизованные двоичные интерфейсы. В отличие от обычных объектов, объекты-компоненты можно собирать в динамически вызываемые библиотеки или исполняемые файлы, распространять в двоичном виде (без исходных текстов) и использовать в любом языке программирования, поддерживающем соответствующую технологию. Данная особенность позволяет программистам создавать продукты, частично состоящие из повторно использованных частей, т.е. использовать технологию, хорошо зарекомендовавшую себя в области проектирования аппаратуры. Компонентный подход лежит в основе технологий, разработанных на базе COM (Component Object Model – компонентная модель объектов) и технологии создания распределённых приложений CORBA (Common Object RequestBroker Architecture – общая архитектура с посредником обработки запросов объектов). Эти технологии используют сходные принципы и различаются лишь особенностями их реализации. Технология СОМ фирмы Microsoft является развитием технологии OLE I (Object Linkingand Embedding – связывание и внедрение объектов), которая использовалась в ранних версиях Windows для создания составных документов. Технология СОМ определяет общую парадигму взаимодействия программ любых типов: библиотек, приложений, операционной системы, т.е. позволяет одной части программного обеспечения использовать функции (службы), предоставляемые другой, независимо от того, функционируют ли эти части в пределах одного процесса, в разных процессах на одном компьютере или на разных компьютерах (рис. 8).
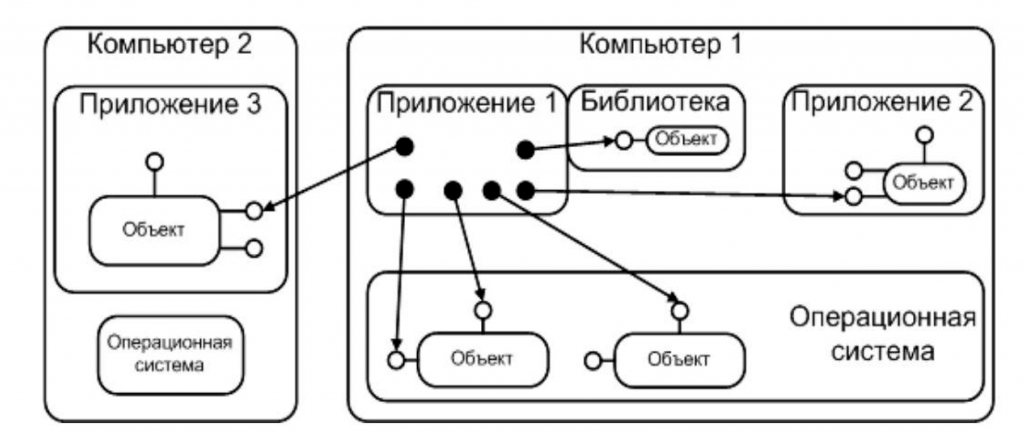
Рисунок 8. Взаимодействие программных компонентов различных типов.
Модификация СОМ, обеспечивающая передачу вызовов между компьютерами, называется DCOM (Distributed COM – распределённая СОМ). На базе технологии СОМ и её распределённой версии DCOM, были разработаны компонентные технологии, решающие различные задачи при разработке программного обеспечения. Взаимодействие программных компонентов различных типов OLE-automation или просто Automation (автоматизация) – технология создания программируемых приложений, обеспечивающая программируемый доступ к внутренним службам этих приложений. ActiveX – технология, построенная на базе OLE-automation, предназначена для создания программного обеспечения, как сосредоточенного на одном компьютере, так и распределённого в сети. Данная технология предполагает использование визуального программирования для создания компонентов – элементов управления ActiveX. Полученные таким образом элементы управления можно устанавливать на компьютер дистанционно с удалённого сервера, причём устанавливаемый код зависит от используемой операционной системы. Это позволяет применять элементы управления ActiveX в клиентских частях приложений Интернет. Технология CORBA, разработанная группой компаний ОМС (Object Management Group – группа внедрения объектной технологии программирования), реализует подход, аналогичный СОМ, на базе объектов и интерфейсов CORBA. Программное ядро CORBA реализовано для всех основных аппаратных и программных платформ. поэтому указанную технологию можно использовать при создании распределённого программного обеспечения в гетерогенной (разнородной) вычислительной среде. Организация взаимодействия между объектами клиента и сервера в CORBA осуществляется с помощью специального посредника, названного VisiBroker, и другого специализированного программного обеспечения. Отличительной особенностью современного этапа развития технологии программирования, кроме изменения подхода, является создание и внедрение автоматизированных технологий разработки и сопровождения программного обеспечения, которые были названы 13 CASE- технологиями (Computer-Aided Software/System Engineering – разработка программного обеспечения/программных систем с использованием компьютерной поддержки). Без средств автоматизации разработка достаточно сложного программного обеспечения на настоящий момент становится трудно осуществимой. На сегодня существуют CASE-технологии, поддерживающие как структурный, так и объектный (в том числе и компонентный) подходы к программированию. Появление нового подхода не означает, что теперь всё программное обеспечение будет создаваться из программных компонентов, но анализ существующих проблем разработки сложного программного обеспечения показывает, что он будет применяться достаточно широко.
5. Пятый этап – трансляция и компиляция программы.
6. Шестой этап – тестирование программы.
Тестирование будет произведено в двух форматах: автономное и комплексное. При автономном тестированию подвергнутся проверке отдельные программные модули, из которых состоит программный комплекс. Комплексное тестирование заключается в проверке всего программного комплекса.
Для тестирования будут отобраны такие исходные данные, для которых результат выполнения программы известен заранее.
В случае обнаружения ошибки при тестировании, начнется процесс отладки тестируемого программного модуля или программного комплекса. Тестирование и отладка чередуются, и завершаются когда будет принято решение об отсутствии ошибок в программном комплексе.
7. Седьмой этап – создание документации
Документация будет выпущена в соответствии с необходимыми требованиями и разбита на несколько групп:
- описание применения;
- руководство пользователя;
- руководство программиста.
Описание применения – общая характеристика программного продукта и сферы его применения, требований к базовому программному обеспечению, комплексу технических средств обработки.
Руководство пользователя – детальное описание функциональных возможностей и технологии работы с программным продуктом для конечного пользователя.
Руководство программиста будет - предназначено для разработчиков программного обеспечения и специалистов, которые будут его сопровождать.
Первую фазу программирование планируется осуществить в течении з лет. В нее войдет создание визуализации данных с навигационного комплекса, создание базы данных и применение существующих наработок математического прогнозирования для наступления событий.
Аппаратная часть.
Изготовление аппаратной части будет реализовано в течении одного года, одновременно в параллели с последним годом создания ПО. К окончанию второго года написания софта, уже должны быть сформированы полноценные требования к необходимому оборудованию. Исходя из них, на базе существующих продуктов, будет выбран сервер и периферия, с его модернизацией при возникающей необходимости.
Главными показателями новой или модернизированной конструкции будут являться:
- высокая производительность, экономичность, прочность и надежность;
- малые масса и металлоемкость, габариты и энергоемкость, затраты на ТО и ТР;
- достаточно большой технический ресурс;
- простота, безопасность и удобство в управлении, эксплуатации, а так же в обслуживании и ремонте оборудования.
Исходя из указанных показателей, рекомендуется при выборе и модернизации оборудования придерживаться следующих основных правил:
- Получение максимально возможного экономического эффекта, соотношение цена/качество формирование функционала под конкретные задачи комплекса;
- Максимальная производительность оборудования;
- Снижение эксплуатационных расходов, возможно в первую очередь при снижении затрат на энергию, обслуживание и ремонт оборудования;
- Повышение эксплуатационной надежности и долговечности оборудования.
Основными факторами, определяющими долговечность машины, являются:- прочность (может быть обеспечена практически для всех деталей);
- износостойкость трущихся поверхностей (может быть увеличена путем повышения твердости, подбора соответствующих материалов, уменьшения удельного давления на поверхности детали, повышения качества обработки поверхности и смазки);
- антикоррозионная стойкость (достигается применением окрасочных материалов, гальванического покрытия, химических и полимерных пленок).
- Обеспечение возможности изготовления машины из стандартных взаимозаменяемых агрегатов, узлов и деталей;
- Легкодоступность узлов, сокращение времени и трудозатрат на обслуживание и ремонт оборудования;
- Уменьшение себестоимости изготовления машины путем унификации, стандартизации, технологичности изготовления и снижения металлоемкости ее узлов;
- Упрощение конструкции, уменьшение габаритов, экономия дорогостоящих материалов при изготовлении оборудования;
- Соблюдение требований технической эстетики (современный дизайн машины);
- Возможность удобного расположения приборов и механизмов управления машиной;
- Обеспечение безопасной работы персонала и защиты окружающей среды от действия оборудования.
Оборудование должно соответствовать требованиям сертификационных обществ IMO и удобству эксплуатации судоводителем.
Создание аппаратной части предполагает следующие этапы:
- Создание аппаратной части предполагает следующие этапы:
- Предпроектное исследование.
- Разработка технических требований.
Целью предпроектного исследования является определение принципиальной возможности и целесообразности создания новой техники на основе изучения тенденций и прогнозирования развития техники, анализа технических достижений и возможности их использования с учетом ограничения времени разработки, элементной базы и т.д.
Целью разработки технических требований, является определение целевого назначения техники, функций и технико-экономических параметров, установление сроков и последовательности выполнения работ, а так же необходимых условий и средств, для их проведения.
- Выбор концепции.
- Поиск оборудования, максимально удовлетворяющего требования комплекса.
- Анализ принципиальных решений, удовлетворяющих техническим требованиям.
- Выбор из имеющихся альтернатив наиболее предпочтительного варианта.
- Разработка проекта конструкции и технологии изготовления.
- Выбор и разработка конструктивных решений при технологии изготовления проектируемого объекта.
- Создание опытного образца.
- Испытание опытного образца.
- Постановка на производство.
- Испытание и коррекция проектируемой техники.
- Определение готовности к серийному производству.
Тестирование.
Следующая часть-это тестирование. В намеченных планах провести тестирование и отладку продукта в течение года, с последующим выводом на новый рынок. Однако реалии определяют срок от трех до пяти лет полной эксплуатации комплекса, для полноценного исключения всех ошибок, неточностей и вывода его на конечный уровень.
В тестировании данного комплекса предлагается использовать следующую этапность:
Этап 1. Работа с требованиями.
Команда тестирования знакомится с требованиями, функционалом комплекса. Тщательное изучение требований должно выявить возникновение возможных противоречий и помочь определить потенциальные дефекты в функционале и требованиях.
Этап 2. Разработка стратегии тестирования и планирование процедур контроля качества.
На данном этапе необходимо резюмировать полученную информацию, оценить сроки тестирования и разработать стратегию тестирования. В частности, необходимо будет:
- определить виды тестирования, которые можно применить к проекту;
- проанализировать среды и ресурсы, имеющиеся для проведения тестирования;
- описать приоритеты для непредвиденных ситуаций;
- определить, где будет вестись тестовая документация;
- определить среду тестирования: какое оборудование и объекты необходимы для тестирования;
- составление плана, четкого описания объекта тестирования, начало и окончание, а так же результаты теста.
Этап 3. Создание тестовой документации.
Цель данного этапа – создать документацию, объем которой будет охватывать детализацию, ход работ, а также вносить ясность во все происходящие процессы для заказчика.
Тестовая документация должна состоять из:
- тестовых сценариев: что и как будет проверяться при регресс-, дымовом и приемочном тестированиях;
- отчетности: результаты тестирования, списка багов и их серьезность;
- методологий тестирования.
Этап 4. Тестирование прототипа.
При создании и тестировании прототипа продукта необходимо будут выявлены основные отклонения от ожидаемого результата и подтвердить соответствие с бизнес-стратегией. Здесь же будут выявлены возможные ошибки в работе логики основного функционала, устранятся найденные уязвимости и дефекты, допущенные на этапе разработки.
Этап 5. Основное тестирование.
Тестирование программного обеспечения, является самым длительным и объемным процессом. Здесь будут сформированы репорты о найденных дефектах, выполнены наборы тестовых сценариев, создана тестовая среда. Реализуется тестирование, виды которого были задокументированы на этапе создания тестовой документации. Смоук- и регресс-тестирования являются одними из основных видов тестирования, которые проводятся на данном этапе.
Этап 6. Стабилизация.
На данном этапе проверяется коммуникация системы и комплекса, то есть проводится интеграционное тестирование.
Этап 7. Эксплуатация и поддержка.
.png)

